
4·
8 months agoThat’s me. Best way I can describe it is like a word cloud but no text or dialog. A bunch of concepts with varying importance and strength of connections.
That’s me. Best way I can describe it is like a word cloud but no text or dialog. A bunch of concepts with varying importance and strength of connections.

Sort of. There isn’t a Nobel prize for economics. He has a Sveriges Riksbank that’s given at the same ceremony.
Maybe it’s because dogs are often big enough to kill you. My cat gets angry I didn’t snuggle right and swats. The cats that big enough to kill us people seldom live with and attacks are frequent.

The creators wanted session 2 to be a different cast and setting. A bunch of grad students that discovered the upside down. Netflix said no keep the kids they are popular.
So they used the original session 2 ideas for that episode.

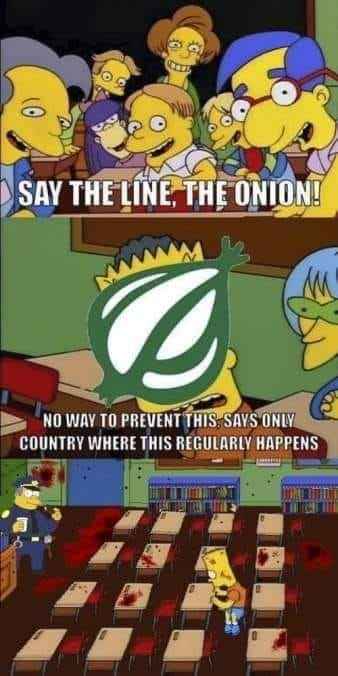
That’s our school lunch program. Here is a gun, go kill something and eat it.

GNOME devs making a bad decision!? Never! /S
So I was on a jury. The officer involved testified on some things that made it sound very bad for the defendant.
Then we saw the body cam of part the interaction. Technically what he said was true but extremely exaggerated. Made us discount everything he said that wasn’t on video.
We ended thinking the defendant was probably guilty but they didn’t prove it so we decided not guilty.
Bimate removal of half.
Decimate comes from decimatus past participle of decimar removal of 1/10.
The main change in the games is it’s set after the assumed death of Geralt in the books. So it’s new stuff after the books. The popularity of the games made Sapkowski write more books that are different from what happens in the games.

And the Romney plan was based on the Republican counter offer when Bill Clinton was trying to get universal health care passed. Clinton rejected it as not good enough.
It’s a simple one frequency sound so a basic band gap filter should do it. Three might be a browser extension that does that.
I’d rather see them bring back Alpha Centauri level costumes and effects than have RTD anywhere near the show. Get someone who knows how to write a good show.
Lower budgets and no fancy effects can force the writers to have to write an engaging story. I don’t want any new Who creatives still involved. I think other than a handful episodes of Eccleston and Capaldi I don’t ever want to rewatch any new Who.
Honestly you have to go all the way back to pre JNT before you get stories I enjoy watching.
Which is a strange decision because Disney is at it’s best when picking good existing stories and doing a quality adaptation.
It needs new blood but keep RTD far away from it. He is garbage at both story and character. I think he is responsible for more that 2/3 of all the fart jokes in Doctor Who.
I think it needs to go back to serials. Give stories enough time to setup problems and them actually solve them. The Doctor just magics hits way out of problems these days.
Sending Floyd to his death in Planet Fall.
Manchin was a democrat from a very right wing state. He never hid his views and that he was going to be very right wing democrat.
Fetterman said he was a progressive, ran as a progressive, and went hard right wing when he got in office. Yeah the brain damage changed him but I think he was always a Republican in Democrat clothes.

Because his original motivation was to impress a girl he liked. Death is a hot chick that he was in to but she wasn’t interested in him. So he figured killing half of all life would impress her.
They decided to make his motivation more sympathetic for the movie. They didn’t think through how his new goal could be better served with the godlike powers he gets.







{kind=link}
{kind=link}
{kind=link}
Stop doing what you enjoy and pay attention to what I want.